












Zenmuse L2 объединяет в себе систему лидарного сканирования, высокоточный IMU собственной разработки и картографическую камеру 4/3 CMOS RGB, обеспечивая полетным платформам DJI более точный, эффективный и надежный сбор геопространственных данных. При использовании в связке с DJI Terra эта камера является готовым решением для сбора 3D-данных и высокоточной постобработки.


Благодаря мощному аппаратному обеспечению L2 может обеспечить точное сканирование сложных объектов в расширенном диапазоне и ускоренное получение облака точек. В процессе работы пользователи могут просматривать, воспроизводить и обрабатывать модели облаков точек в режиме реального времени, а отчеты о качестве выполнения задач формируются DJI Terra, обеспечивая простое и универсальное решение для повышения общей эффективности работы. Это позволяет пользователям получать высокоточные результаты облаков точек с помощью одномоментной постобработки.

DJI Zenmuse L2 позволяет вести обнаружение с расстояния 250 метров при коэффициенте отражения 10% и 100 клк[3], и до 450 метров при коэффициенте отражения 50% и 0 клк. [3] Стандартная рабочая высота теперь достигает 120 м, что значительно повышает безопасность и эффективность работы.
Благодаря уменьшенному размеру луча 4×12 см @100 м, что составляет лишь пятую часть от размера луча Zenmuse L1, модель L2 не только обнаруживает более мелкие объекты с большей детализацией, но и может проникать в густую растительность, создавая более точные цифровые модели рельефа (ЦМР).
На участках с густой растительностью подвес DJI Zenmuse L2 может захватывать больше точек под листвой и растительностью.
В режимах однократного и многократного возврата лидар L2 может достигать максимальной скорости передачи облака точек до 240 000 точек в секунду, что позволяет получить больше данных в заданный промежуток времени.
DJI L2 поддерживает два режима сканирования, обеспечивая гибкость для пользователей в зависимости от их задач. В режиме многократного сканирования лидар L2 позволяет получать более однородные и точные облака точек, соответствуя требованиям высокоточного картографирования. В режиме однократного сканирования он обеспечивает более глубокое проникновение для получения большего количества структурной информации, что делает его пригодным для обследования линий электропередач, лесоустроительных работ, и других задач.
Конструкция в едином корпусе (фрэйм-дизайн) обеспечивает эффективную скорость передачи данных облака точек до 100%. Вместе с 3-осевым стабилизатором система открывает больше возможностей для съемки.
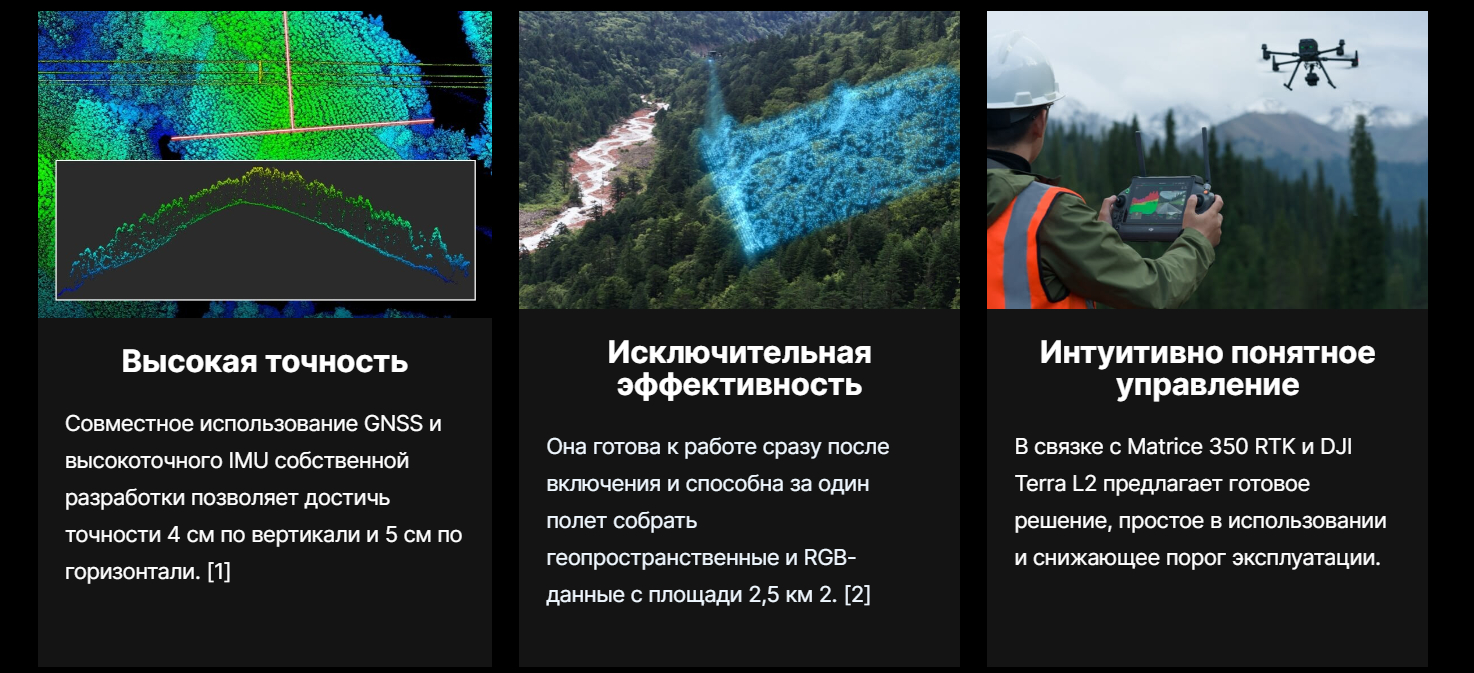
Высокоточная система IMU собственной разработки в сочетании с системой RTK-позиционирования дрона позволяет объединять данные при постобработке, что дает L2 доступ к высокоточной информации об абсолютном положении, скорости и ориентации в пространстве. Кроме того, повышенная адаптивность системы IMU к условиям окружающей среды повышает эксплуатационную надежность камеры L2.
Точность наклонов: в реальном времени: 0,2°, при постобработке: 0.05°
Точность измерения угла продольного/поперечного наклона[6]: в реальном времени 0,05°, при постобработке 0,025°
Разработчики значительно улучшили производительность системы IMU, поэтому она готова к использовать моментально после включения камеры. А дрон с камерой Zenmuse L2 также готов приступить к выполнению задач сразу же, как только RTK перейдет в статус FIX, обеспечивая более производительную работу в полевых условиях.
Размер пикселя был увеличен до 3,3 мкм, а эффективное число пикселей достигло 20 Мп, что позволило значительно улучшить общее качество изображения, а также повысить детализацию облака точек в реальном цвете. Минимальный интервал между снимками уменьшен до 0,7 секунды. Картографическая камера имеет рабочий цикл до 200 000 циклов, что еще больше снижает эксплуатационные расходы. Когда сбор облака точек не требуется, RGB-камера может продолжать фото- и видеосъемку или собирать изображения для картирования в видимом диапазоне света.

Поддерживаются типы маршрутов “Полет по точкам”, “Область/Площадная съемка” и “Линейный маршрут”, что позволяет решать задачи геодезии в различных средах.
Во время работы DJI Pilot 2 поддерживает три режима отображения – RGB, облако точек и облако точек/RGB side-by-side, представляя результаты работы в интуитивно понятном виде. Активация функции RNG (Laser Rangefinder) позволяет получить информацию о расстоянии между модулем LiDAR и объектом в центре FOV, что повышает безопасность полета. Также поддерживаются четыре режима цветопередачи облака точек в реальном времени – отражение, высота, расстояние и RGB.
После выполнения операции 3D-модель облака точек[7] можно просмотреть непосредственно на пульте. 3D-модели облака точек за несколько полетов также могут быть объединены, что позволяет оперативно принимать решения о качестве работы.
После сбора данных облака точек приложение DJI Pilot 2 автоматически формирует отчет о качестве выполнения задания [8], чтобы операторы могли проверить результаты работы в режиме реального времени на месте, что делает полевые работы более оперативными и комфортными.
В сложных условиях работы пользователи могут настроить базовые станции RTK до начала операции, чтобы заранее избежать потери данных RTK из-за помех, разрыва связи при передаче видеосигнала или других проблем. После операции импортируйте исходные файлы в DJI Terra, чтобы использовать процесс PPK (кинематическая постобработка) для построения высокоточных моделей.
При импорте данных облака точек в DJI Terra достигается эффективная и надежная универсальная постобработка. После расчета траектории движения облака точек и оптимизации его точности одним щелчком мыши создается 3D-модель облака точек стандартного формата. После классификации точек грунта с помощью функции “Тип точки грунта” можно получить ЦМР. Качество облака точек может быть проанализировано с помощью функции “Контроль и проверка точности”
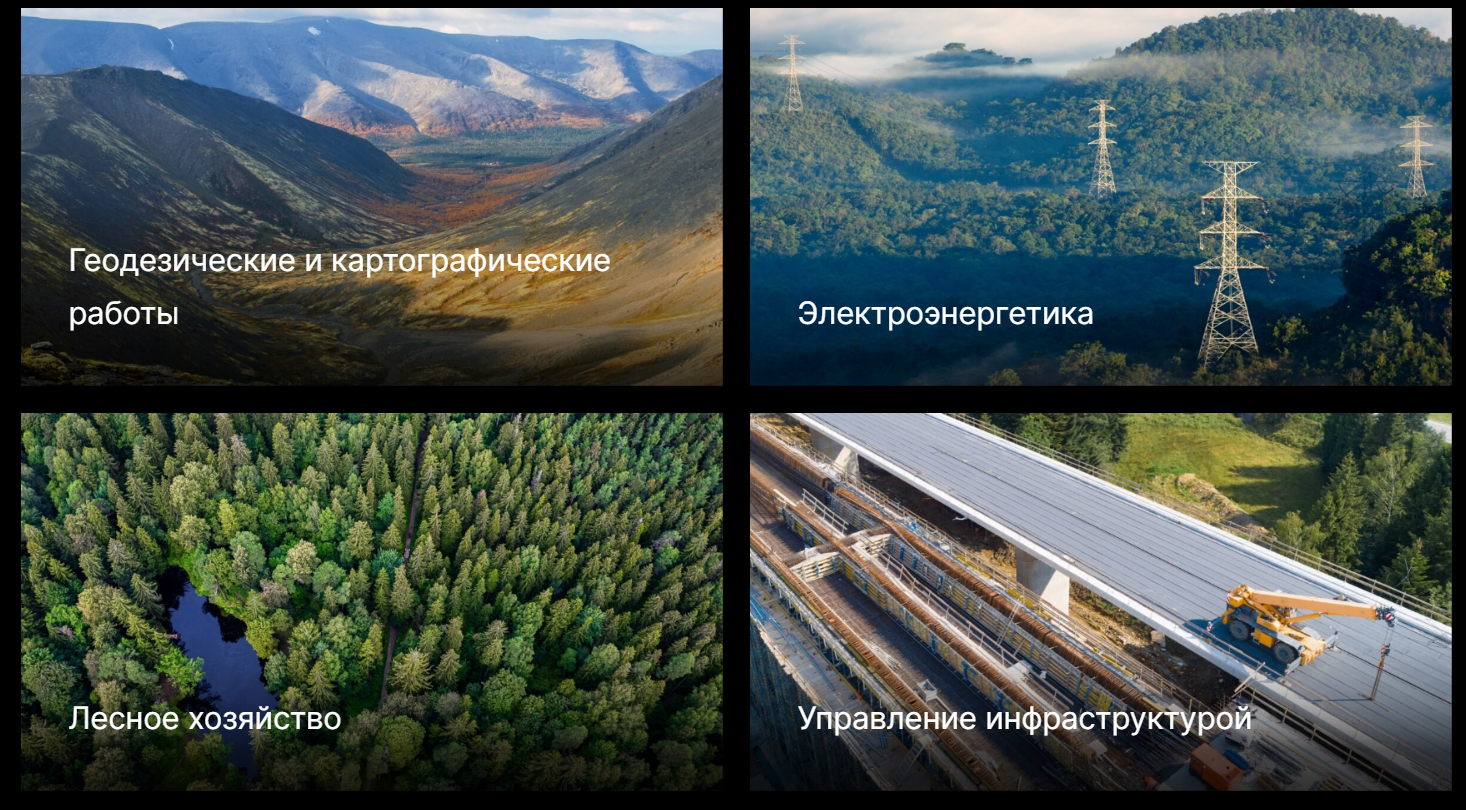
В связке с летающими платформами DJI Enterprise и DJI Terra, Zenmuse L2 может применяться в землеустройстве и картографии, электроэнергетике, лесном хозяйстве, управлении инфраструктурой, а также в других направлениях.
| полетная платформа DJI Matrice 350 | |
|---|---|
| Макс. полезная нагрузка одного подвеса | 960 г |
| Макс. взлетная масса | 9,2 кг |
| Диапазон рабочих частот | 2.4000-2.4835 ГГц В некоторых странах частотные диапазоны 5,1 ГГц и 5,8 ГГц запрещены. Или же частоты 5,1 ГГц можно использовать только внутри помещений. Перед эксплуатацией платформы ознакомьтесь с местным законодательством и правилами полетов. |
| Мощность передатчика (EIRP) | 2.4000-2.4835 ГГц: < 33 дБм (FCC) < 20 дБм (CE/SRRC/MIC) |
| Точность парения (при умеренном ветре или в безветренную погоду) | По вертикали: ±0.1 м (с визуальным позиционированием) ±0.5 м (с позиционированием по глобальным навигационным системам) ±0.1 м (с позиционированием по RTK) По горизонтали: ±0.3 м (с визуальным позиционированием) ±1.5 м (с позиционированием по глобальным навигационным системам) ±0.1 м (с позиционированием по RTK) |
| Точность позиционирования RTK (RTK FIX) | 1 см + 1 мм/км (по горизонтали) 1,5 см + 1 мм/км (по вертикали) |
| Макс. угловая скорость | Крен: 300°/сек Рыскание: 100°/сек |
| Макс. угол крена | 30° Если аппарат находится в режиме N и подключенной передней визуальной системой, то угол составит 25°. |
| Макс. скорость набора высоты | 6 м/сек |
| Макс. скорость снижения (по вертикали) | 5 м/сек |
| Макс. скорость снижения с наклоном | 7 м/сек |
| Макс. горизонтальная скорость | 23 м/сек |
| Макс. высота полета | 5000 м При использовании пропеллеров 2110s и взлетной массе ≤ 7,4 кг. 7000 м При использовании высотных малошумных пропеллеров 2112 и со взлетной массой ≤ 7,2 кг. |
| Макс. допустимая скорость ветра | 12 м/сек |
| Макс. полетное время | 55 минут Данные получены при использовании Matrice 350 RTK со скоростью около 8 м/сек без полезной нагрузки в безветренную погоду с полностью заряженной батареей, разрядившейся в процессе теста до 0%. Данные можно использовать только для справки. Во время реальных полетов время может отличаться в зависимости от полетного режима, аксессуаров и окружающих условий. Обращайте внимание на предупреждения в приложении. |
| Поддерживаемые стабилизированные камеры DJI | Zenmuse H20, Zenmuse H20T, Zenmuse H20N, Zenmuse P1, Zenmuse L2 |
| Поддерживаемые конфигурации подвесов | 1 подвес внизу 1 подвес вверху 2 подвеса внизу 1 подвес внизу + 1 подвес вверху 2 подвеса внизу + 1 подвес вверху |
| Класс защиты | IP55 Класс защиты не действует вечно, но снижается по мере износа продукта или его повреждения. |
| Системы глобальной навигации | GPS + GLONASS + BeiDou + Galileo |
| Диапазон рабочих температур | От -20° до 50° C |
| Размеры (в разложенном состоянии, без пропеллеров) | 810 × 670 × 430 мм (Д × Ш × В) |
| Размеры (в сложенном состоянии, с пропеллерами) | 430 × 420 × 430 мм (Д × Ш × В) |
| Размеры по диагонали | 895 мм |
| Вес (с одним подвесом внизу) | без батарей: около 3,77 кг с двумя батареями TB65: около 6,47 кг |
| Пульт дистанционного управления | |
| Дисплей | 7,02 дюймов с сенсорным ЖК-экраном; разрешение: 1920×1200; макс. яркость: 1200 нит |
| Системы глобальной навигации | GPS + Galileo + BeiDou |
| Встроенная батарея | Тип: Li-ion (6500 мАч при 7,2 В) Тип зарядки: станция зарядки батарей или устройство быстрой зарядки USB-C с макс. мощностью 65 Вт (макс. напряжение 20 В). Время зарядки: 2 часа Химический состав: LiNiCoAlO2 |
| Внешняя батарея (Интеллектуальная батарея WB37) | Емкость: 4920 мАч Напряжение: 7,6 В Тип: Li-ion Потребление энергии: 37,39 Втч Химический состав: LiCoO2 |
| Класс защиты | IP54 |
| Время работы | От встроенной батареи: около 3,3 часов От встроенной и внешней батареи: около 6 часов |
| Диапазон рабочих температур | От -20° до 50°C |
| Рабочие частоты | 2.4000-2.4835 ГГц |
| Мощность передатчика (EIRP) | 2.4000-2.4835 ГГц: < 33 дБм (FCC) < 20 дБм (CE/SRRC/MIC) |
| Протокол Wi-Fi | Wi-Fi 6 |
| Рабочие частоты Wi-Fi | 2.4000-2.4835 ГГц |
| Протокол Bluetooth | Bluetooth 5.1 |
| Рабочие частоты Bluetooth | 2.4000-2.4835 ГГц |
| Вес | около 1,25 кг (без батареи WB37) около 1,42 кг (с батареей WB37) |




")

